Planning berbeda dengan Search-Based
Problem Solving dalam hal representasi goals, states, dan actions, juga berbeda dalam representasi dan pembangunan
urutan-urutan action. Planning berusaha untuk mengatasi
kesulitan-kesulitan yang dialami dalam Search-Based
Problem Solving.
Planning adalah
suatu metode penyelesaian masalah dengan cara memecah masalah ke dalam sub-sub
masalah yang lebih kecil, menyelesaikan sub-sub masalah satu demi satu,
kemudian menggabungkan solusi-solusi dari sub-sub masalah tersebut menjadi
sebuah solusi lengkap dengan tetap mengingat dan menangani interaksi yang ada
antar sub masalah.
Dalam Bahasan ini kita akan membahas penyelesaian suatu
contoh kasus permasalahan Planning
dengan menggunakan Partial order planning dan Graph Plan.
Permasalahan pertama:
Shopping (menggunakan algoritma Partial order Planning)

Langkah penyelesaian:
Tahap awal yaitu membuat langkah dari awal sampai ke
finish seperti pada gambar diatas.

Tahap selanjutnya menambahkan go(HDW) sebagai (X1) untuk
mencapai untuk mencapai at(HDW) dan menambahkan go(SM) sebagai (X2)
untuk mencapai at(SM).

Langkah selanjutnya kita bisa menjalankan langkah actian go(X1)
dan precond Go(HDW), dengan menggunakan effect at(Home). Serta menjalankan
langkah action go(X2) dan precond Go(SM), dengan menggunkan effect at(Home)
seperti gambar diatas.

Setelah selesai dengan langkah sebelumnya, kita harus
memperhatikan masalah apa saja yang mungkin terjadi yang bisa kita lihat pada
gambar diatas. Pada gambar diatas, masalah terjadi dapat kita lihat pada bulatan
yang ditunjuk oleh tanda panah, kita dapat memperhatikan bahwa Go(SM) tidak
bisa tersambung ke at(Home) sebagai akibat sudah dimiliki oleh at(X1),
dan juga berlaku sebaliknya untuk Go(HDW).

\
Solusi yang dapat kita ambil, mungkin kita bisa memerlukan
Go(SM) terjadi setelah Go(HDW). Kita bisa memutuskan untuk memenuhi at(X2)
dengan hasil at(HDW) Go(HDW) dan at(HDW) Go(HDW), tetapi jika kita menuju at(HDW)
Go(HDW) kita tidak bisa menuju at(HDW) Sells(HDW,D).

Solusi yang dapat kita ambil dengan menempatkan Go(SM)
antara GO(HDW) dan at(HDW) yang ditunjukan oleh tanda panah pada gambar diatas.
Tetapi jika seperti itu kita harus menuju dua kali ke Go(HDW) karena sehabis ke
Go(HDW) kita menuju Go(SM) dan balik lagi ke Go(HDW) untuk Buy(Drill).

Solusi yang dapat diambil dengan meletakan Go(SM) terjadi
setelah Buy(Drill). Dengan menandakan nya dengan garis putus putus berwarna
merah untuk memastikan bahwa hal ini terjadi.
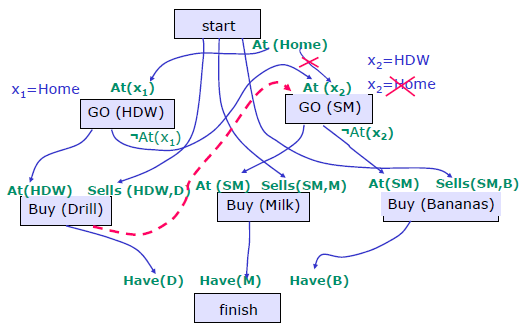
Setelah kita berada di GO(SM) kita bisa Buy(Milk) dan
Buy(Bananas) dan terakhir menuju at(Home).

Permasalahan kedua:
Birthday Dinner(menggunakan algoritma Graph Plan)
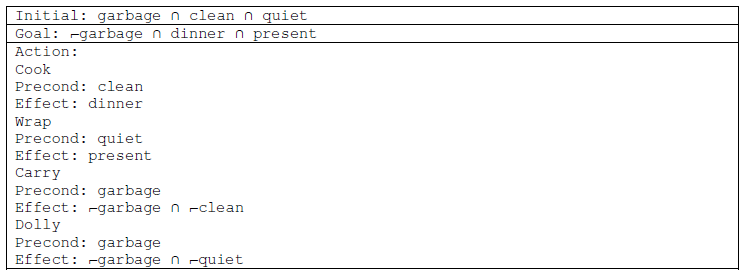
Langkah
Penyelesaian:
Langkah awal
dengan meletakkan di kondisi awal.

Masukan action
yang dapat dilakukan dan hubungkan dengan Initial State.

Setelah itu, kita
masukan hasil dari action yang dapat kita lakukan.

Selanjutnya, kita
akan membuat mutex dari Graph Plan ini, alasannya bahwa tindakan dapat mutex
adalah karena efek yang tidak konsisten. Dapat dilihat Clean mutex dengan Carry
membuat Clean menjadi salah. Begitu juga dengan Garbage mutex dengan Carry dan
Dolly membuat Garbage menjadi salah. Begitu juga dengan Quiet mutex dengan
Dolly membuat quiet menjadi salah.
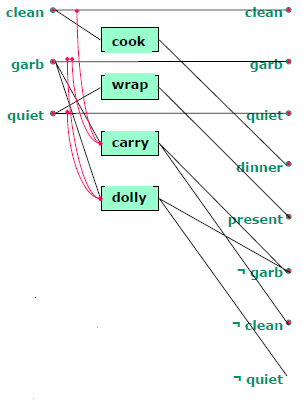
Alasan lain dari
mutex adalah karena adanya gangguan: suatu action meniadakan precondition dari
action lain. Dapat dilihat Carry mutex dengan Cook dan Dolly dan meniadakan
precondition hasilnya, begitu juga dengan Wrap mutex dengan Dolly dan
meniadakan precondition hasilnya

Pertama-tama,
setiap proposisi mutex dengan bentuk yang negatif. Kemudian Karena alasan lain
dari mutex adalah karena dukungan tidak konsisten. Jadi, Garbage mutex dengan
not Clean dan not Quiet (karena untuk mendapatkan Garbage kita harus
mempertahankan itu, yang mutex dengan Carry dan Dolly). Dinner mutex dengan not
Clean (karena Cook dan Carry mutex pada level sebelumnya). Present mutex dengan
not Quiet (karena Warp dan Dolly mutex pada level sebelumnya). Begitu juga
dengan not Clean dan not Quiet (karena Carry dan Dolly mutex pada level
sebelumnya).

Kita coba dengan
cara lain, kita akan mendapatkan not Garbage dengan action Carry, dan Dinner
dengan action Cook, tetapi Carrry dan Cook mutex jadi gagal.

Kita coba dengan
cara lain, kita akan mendapatkan not Garbage dengan action Dolly, dan Dinner
dengan action Cook, serta Present dengan action Wrap, tetapi Doly dan Wrap
mutex.

Dikarenakan tidak
ada cara lain untuk mendapatkan goal kita akan menggunakan depth two plan,
yaitu menambahkan dua level lagi pada Graph.

Pada tahap ini
kita mendapatkan mutex sama seperti di level sebelumnya

Pada level ini
kita juga mendapatkan mutex yang sama dengan level sebelumnya, tetapi terdapat
perbedaan yaitu pada level ini Dinner tidak mutex dengan Carry,karena kita bisa
mendapatkan Dinner dengan membiarkannya dan tetap bisa melakukan Carry. Begitu
juga dengan Present tidak mutex dengan Dolly karena kita bisa mendapatkan
Present dengan membiarkannya dan dapat tetap melakukan Dolly.

Setelah kita
selesai dengan mutex kita mencari lagi dengan cara seperti gambar diatas dan
akhirnya dapat berhasil dengan cara seperti yang ditunjukan oleh gambar diatas.

Referensi :
Lecture11FinalPart1.pdf
Lecture12FinalPart1.pdf